While playing around with this phase-shift idea (via precisely timed ADC triggers) I came to the conclusion I needed a bit of “power maths” in order to see it in action. So I knocked up some basic Vrms, Irms, Papp, Preal, PF calculations and used the offset-removal techniques described in @Robert.Wall’s excellent paper here: emonLib Maths(extended).pdf.
I tried to make it emonTxShield friendly because I figured that would be a common starting point for everyone, so it supports 4 current inputs and 1 voltage input. I scheduled the ADC conversions as follows:
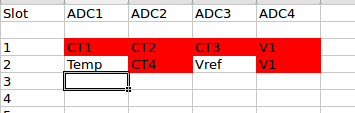
Which means in the first slot in the sequence it does 3 CT conversions and a VT conversion. In the second slot it does the 4th CT, with a new VT conversion. I had to give ADC1 and ADC3 something to do during those slots, so I selected a couple of internal channels: Temperature and Vref although I’ve not even looked at the data that comes back in those slots.
At this stage there’s just single phase difference setting between V and all the I’s. In other words, I trigger ADC4 on the rising edge and the other three on the falling edge. Having different phase settings on different CT channels may prove challenging.
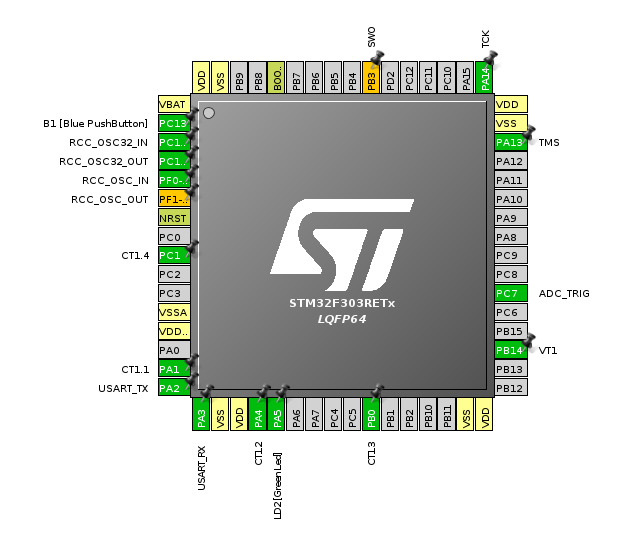
One slight hiccup is I need to get the V input onto an ADC of its own (ADC4) so I moved it across to PB14 like so:
The four CT inputs line up perfectly with the emonTxShield usage and to get V to work you just need to run a jumper wire from CN7.28 (PA0) to CN10.28(PB14):
The fact that V is also connected to PA0 doesn’t matter, as in this example it’s configured as an unused analog input, so doesn’t get in the way. So a single wire with a female jumper connector on each end should get you going with the shield.
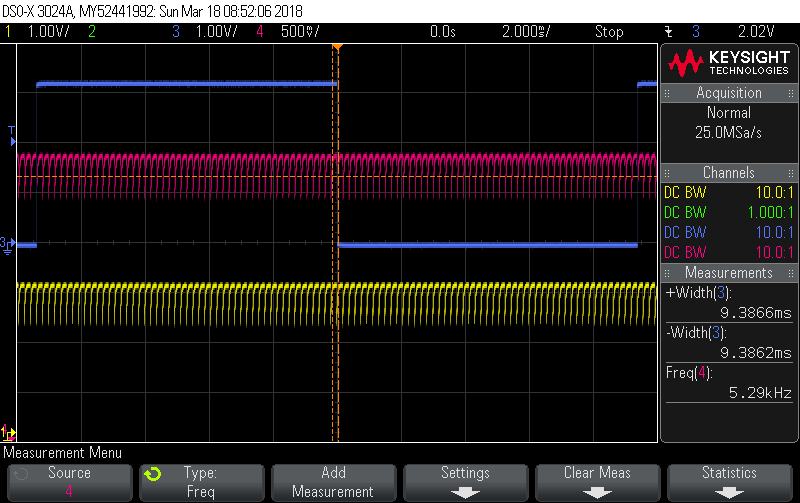
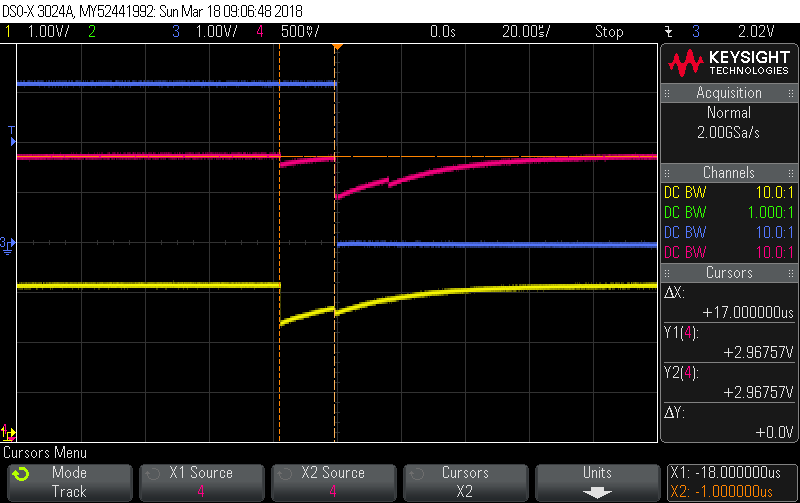
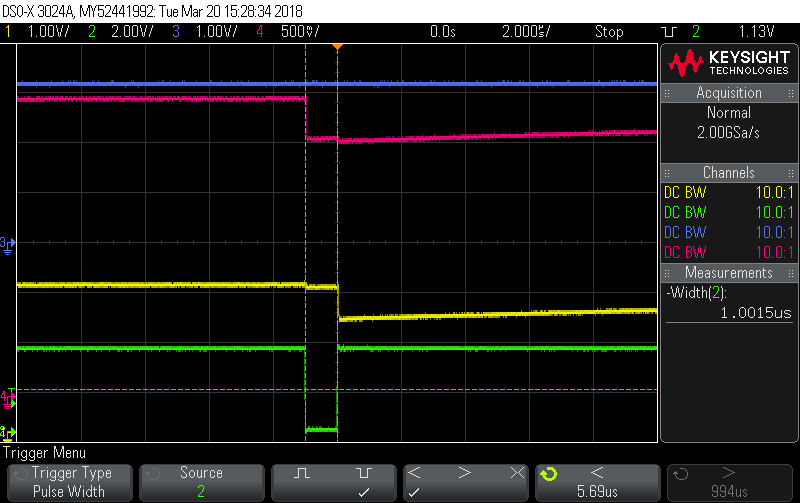
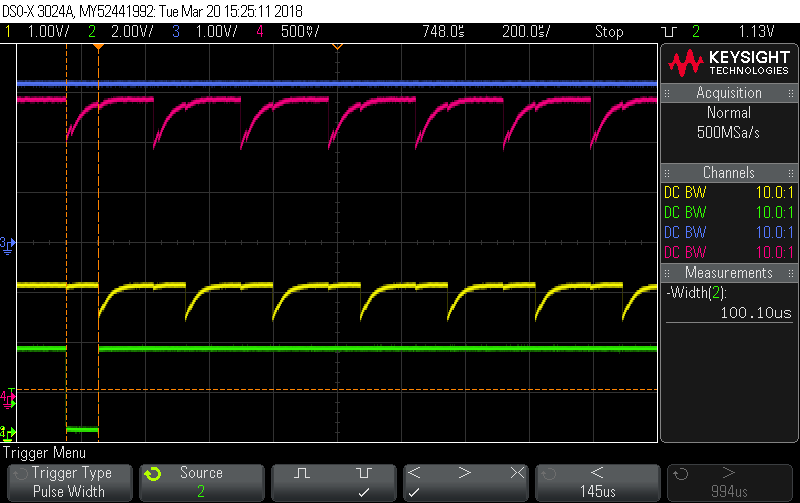
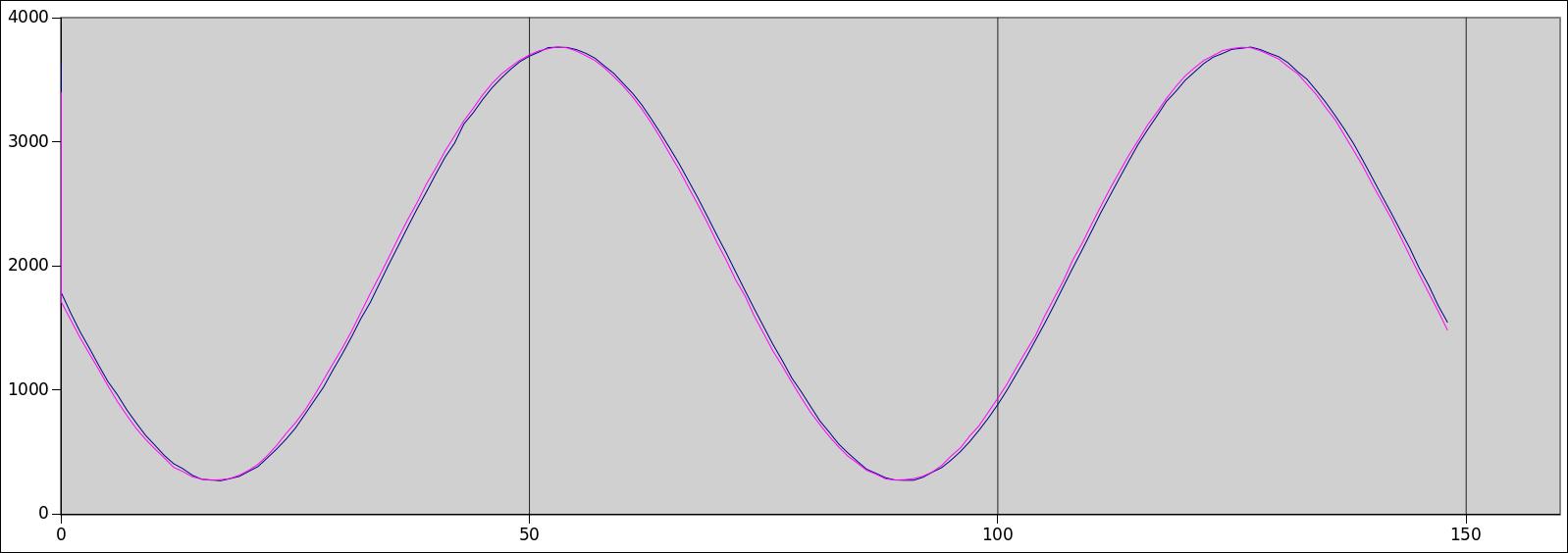
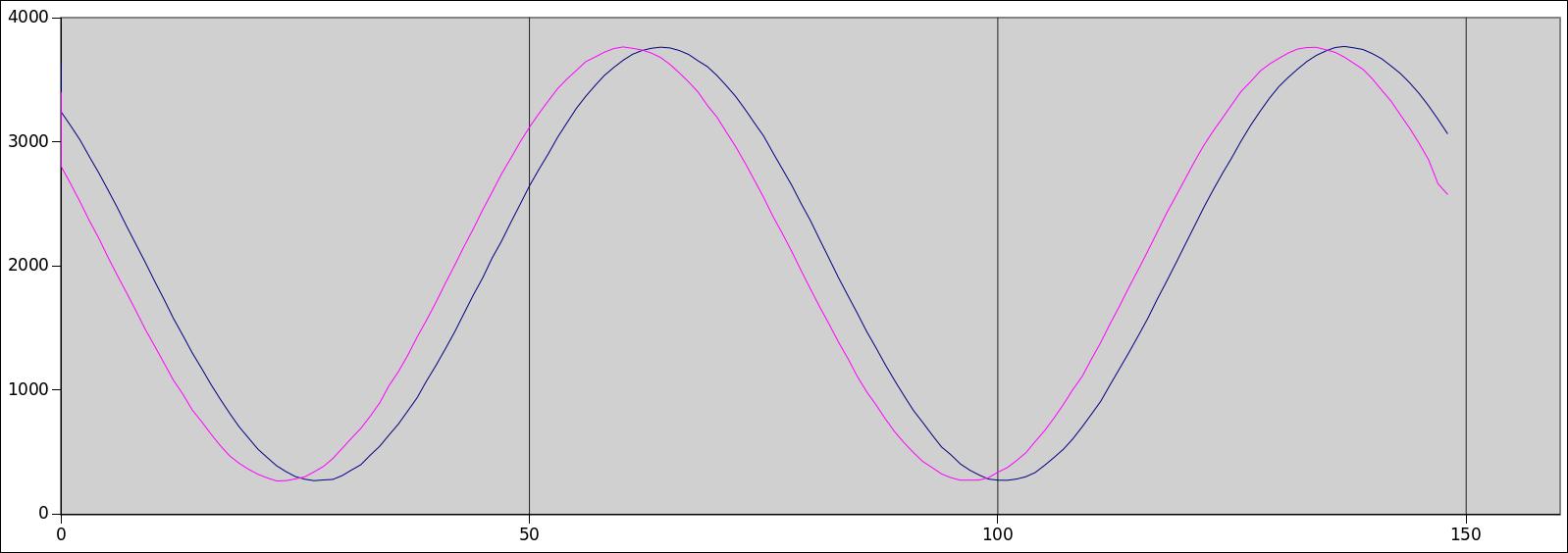
The early results look promising, this is specifying a 3333 usec delay between ADC4 and all the others like this:
start_ADCs(3333); // start ADC with x usec lag
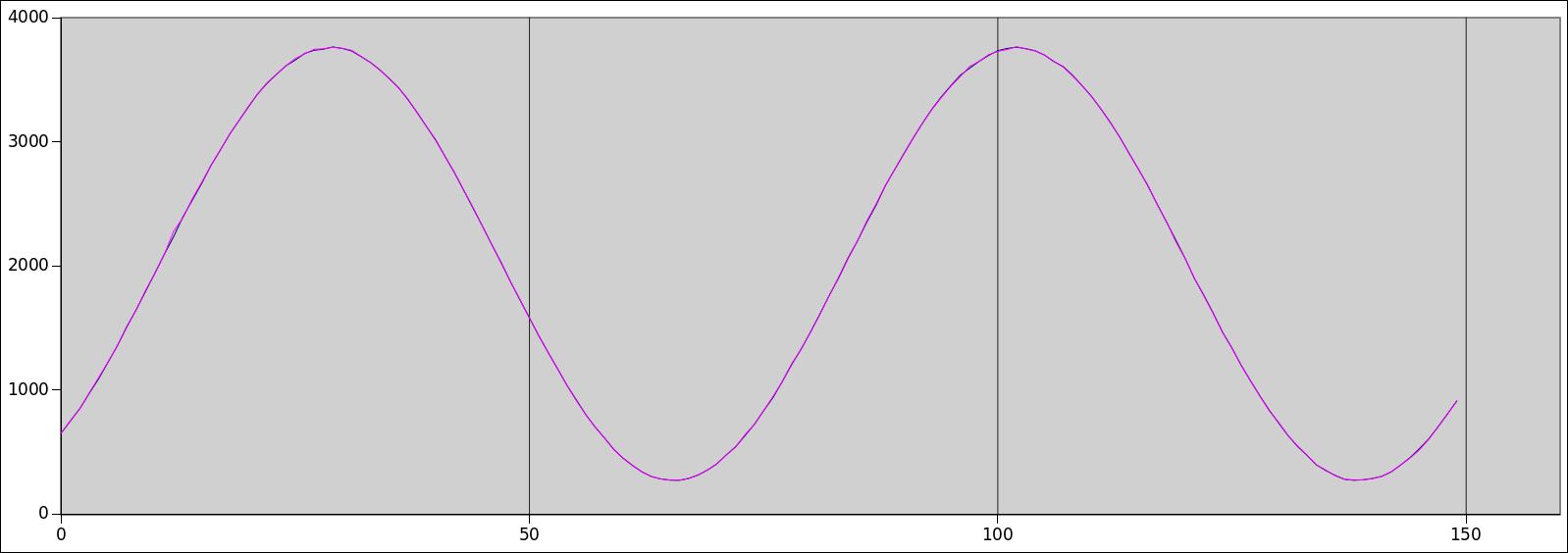
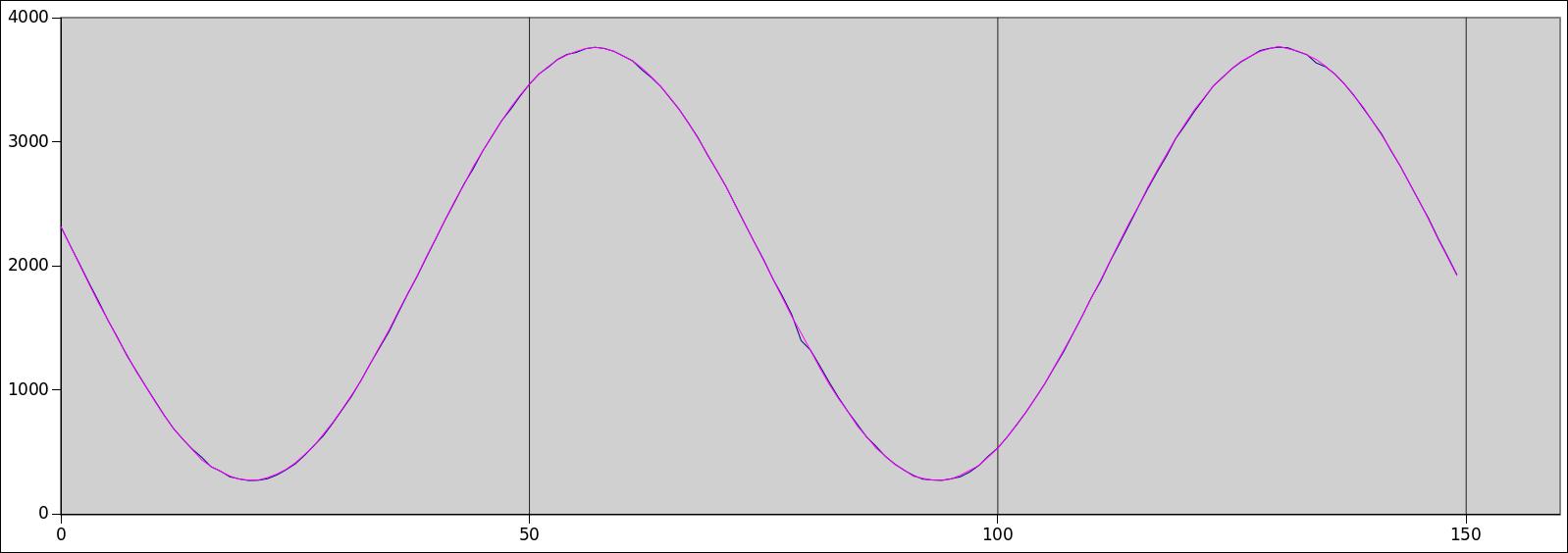
That should give ~60° phase shift. And with my signal generator sinewave feeding all 5 inputs the results look good:
0: Vrms: 1234.22, Irms: 1234.44, Papp: 1523560.12, Preal: 761240.69, PF: 0.500
1: Vrms: 1234.22, Irms: 1234.06, Papp: 1523093.12, Preal: 761020.94, PF: 0.500
2: Vrms: 1234.22, Irms: 1234.21, Papp: 1523286.88, Preal: 761084.25, PF: 0.500
3: Vrms: 1234.22, Irms: 1234.03, Papp: 1523063.00, Preal: 760992.19, PF: 0.500
All numbers are in raw ADC units.
I’ll attach the Src/Inc/build directories here after a bit of a clean up, feel free to use as much or as little of them as you like. I was not sure whether the quietness on this thread was a good sign (everyone’s madly coding) or a bad sign (everyone’s stuck in the mysteries of HAL calls). If the former, feel free to ignore this code, if the latter, it’ll hopefully get you unstuck. If you just want to play with your own power calculation libraries, it should be hopefully easy enough to hook it in instead of my cheap-n-cheery power calculations.
txshield_demo.tar.gz (240.3 KB)
 I had to change ADC2 to ADC1, bool to unit16_t with a #define true 1 & #define false 0 as I kept getting error: ‘false’ undeclared and I commented out HAL_ADCEx_Calibration_Start(&hadc1, ADC_SINGLE_ENDED); it may not be available on the f401re?..
I had to change ADC2 to ADC1, bool to unit16_t with a #define true 1 & #define false 0 as I kept getting error: ‘false’ undeclared and I commented out HAL_ADCEx_Calibration_Start(&hadc1, ADC_SINGLE_ENDED); it may not be available on the f401re?..