Here are some real pictures of a SCT-013-000 current transformer faced with half-wave rectified d.c.
First, at about 22 A primary current. (20 turns @ 1.1 A)
The upper (yellow) trace is the voltage across a 0.33 Ω shunt, the lower (blue) trace the voltage across the c.t’s 10 Ω burden.
In each case, the zero level is marked by the arrows on the left-hand edge of the window.
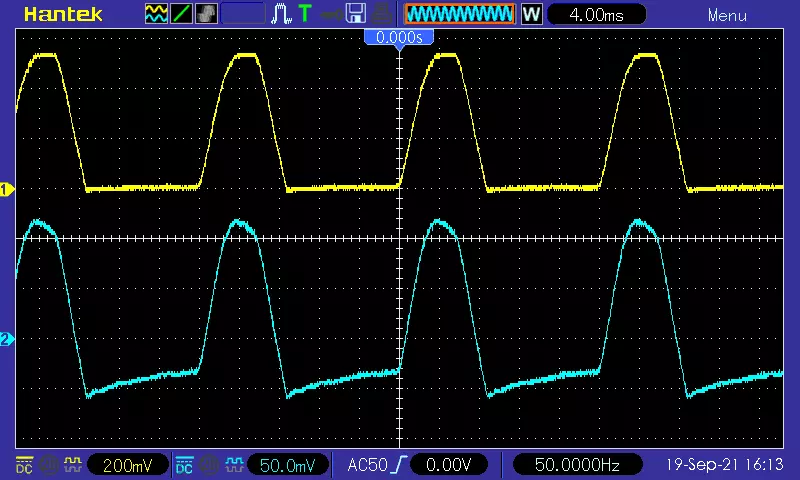
The “base” of the wave, which is a flat line at zero in the primary circuit has become a sloping line (because of the limited low-frequency response of the c.t. - see Measuring AC current output from a VFD - #18 by dBC) and it’s offset negatively so that the average over a cycle is zero - again because the c.t. blocks d.c.
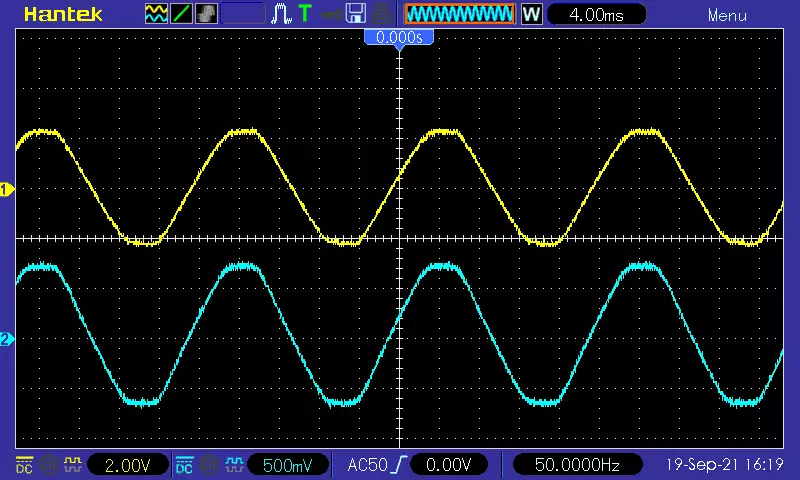
Here is the same c.t. at about 100 A - no rectifier:
And with the rectifier, using the same scales, but slightly less current. It is not at all happy with that:
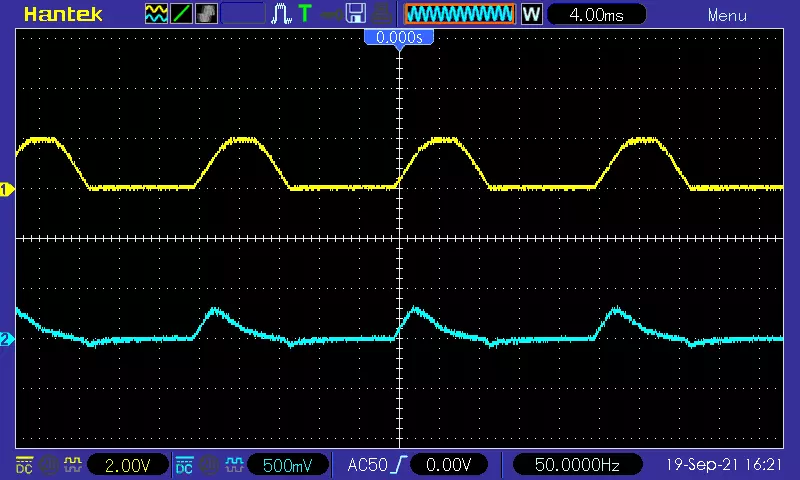
Had that been a steel core in the c.t. rather than ferrite, it would probably need demagnetising now to restore accuracy.