As mentioned above, the first step on my STM32 Development plan is:
“Work through STM32 power supply, clock, programming sub circuits, check understanding, component sourcing. Put together base board design (equivalent of a STM blue pill, or Ken’s ARMIGO) potentially with a couple of CT and ACAC sensor inputs for initial testing.”
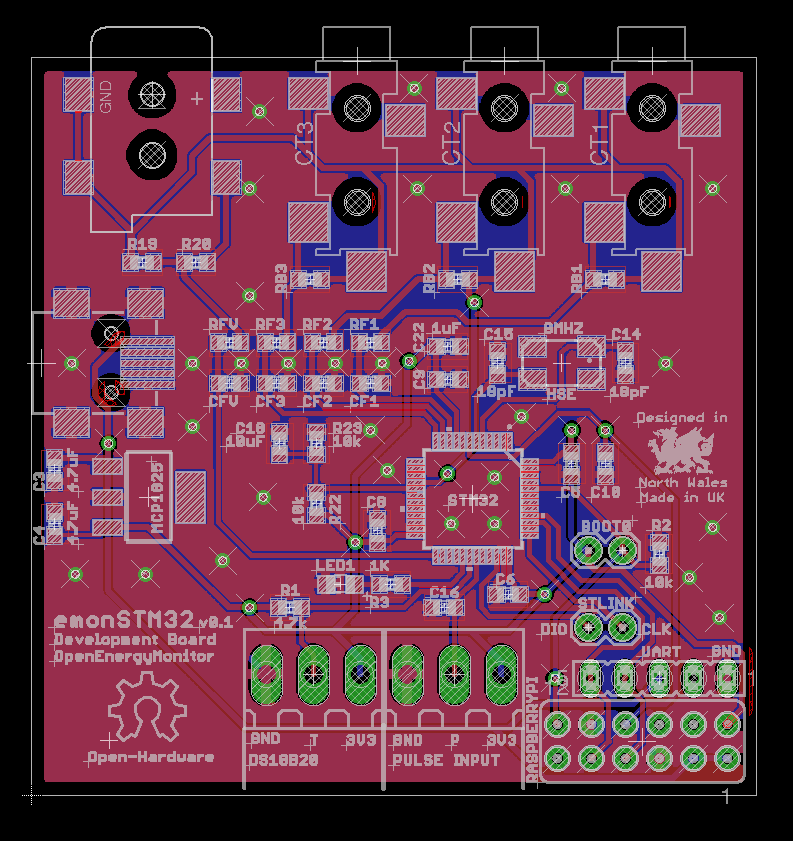
I’ve now put together this first design and will be sending it off to ragworm hopefully tomorrow. I’m fully expecting this prototype to have errors as it’s my first design with this chip. If anyone can spot any, please let me know 
Bearing in mind that the intention of this design is just to test the basics and not to fulfil the longer term project goal of a more capable multi-CT unit, here is the spec:
- STM32F303CBT6 core 120 kBytes flash, 40kBytes SRAM, LQFP 48
- 3x CT inputs (ADC1), 1x ACAC input (ADC4).
- Simple RC filter on each input
- DS18B20 input
- Pulse Counting input
- External high speed clock (8MHz)
- RaspberryPi hat/shield design to fit in emonbase case
- OTA RaspberryPi update hardware support
- On board LED indicator
Design notes:
https://github.com/openenergymonitor/STM32/blob/master/docs/stm32notes.md
Eagle, schematic, board and gerbers
https://github.com/openenergymonitor/STM32/tree/master/Hardware/5
What it should look like in the emonbase/rpi case:
