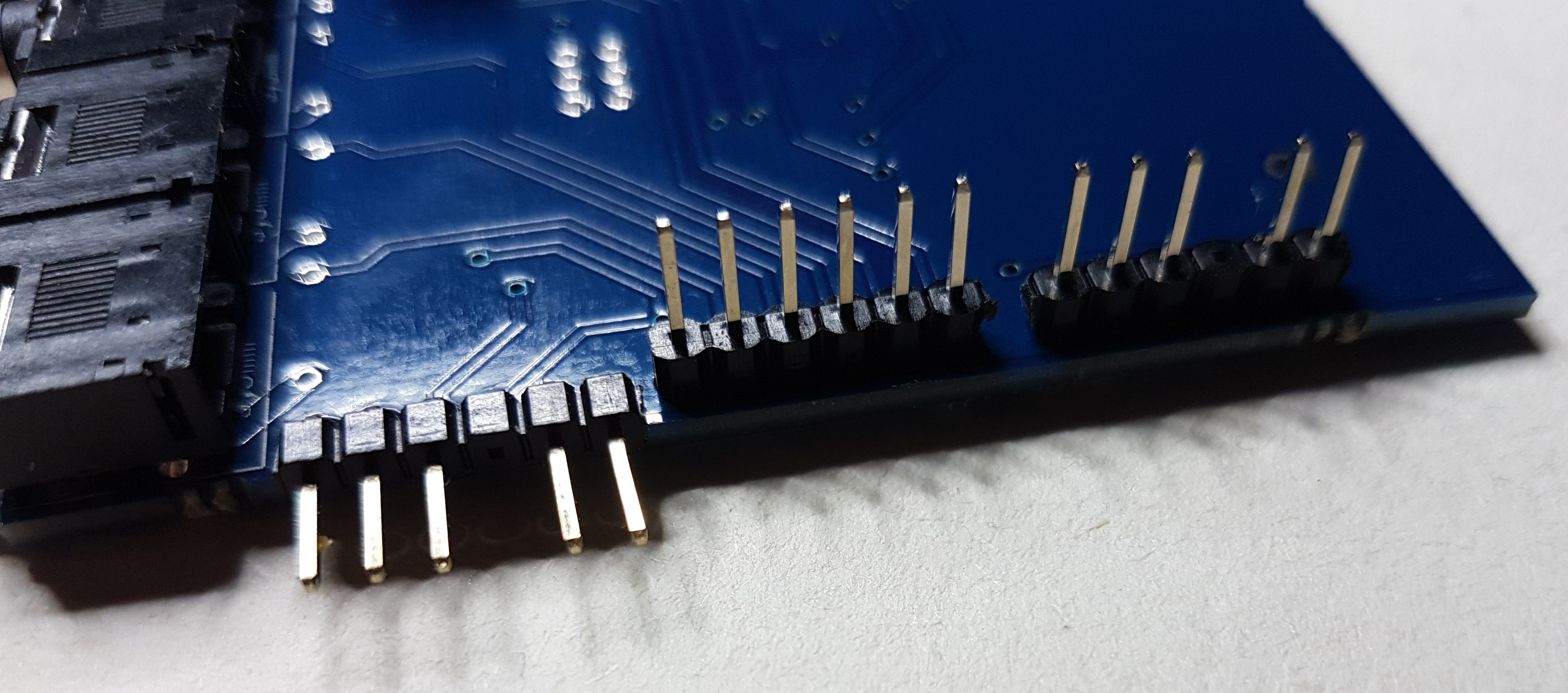
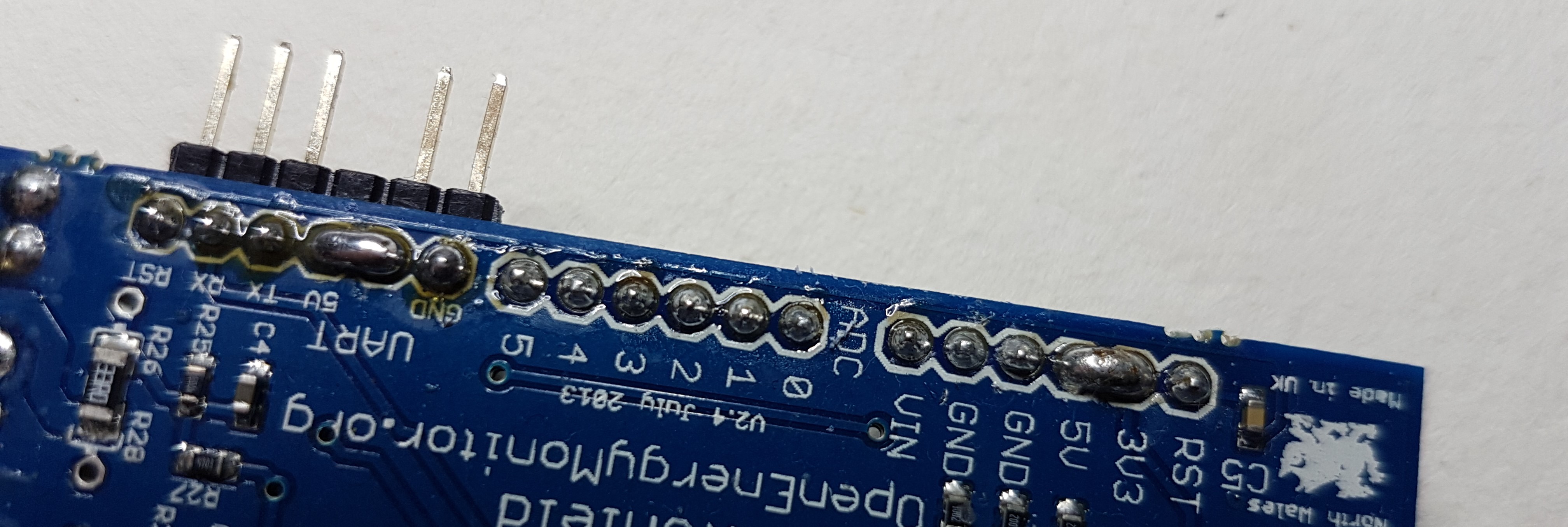
That is a solder bridge to link the 5v and 3.3v rails of the shield because it was originally 5v powered, now all 3.3v. under that solder bubble, the 5v header pin has also been removed so that both the 3.3v and 5v rails of the shield get their power from the 3.3v rail of the STM32.
[edit - When I fitted a 6pin FTDI header I did the same, @Trystan did the original mods.]