Hi Dave,
I use an Elkor WattsOn power transducer which gives me (via Modbus) separate
measurements for PV power generated as well as Leg1 and Leg2 consumption.
I went that route for a few reasons.
- I wanted resonable accuracy without the need for calibration before use
- I wanted to be able to use 333 mV CTs
- I wanted a Modbus device.
That may have been overkill, but at the time (~4 years ago) the WattsOn was the cheapest solution.
(cost ~$75)
Having a fairly straightforward setup, all I wanted was PV generation and overall consumption data. What little math I do gets done in the Python script that reads the meter, which then sends the calculated values to Influx.
In 2018, nchaveiro posted this:
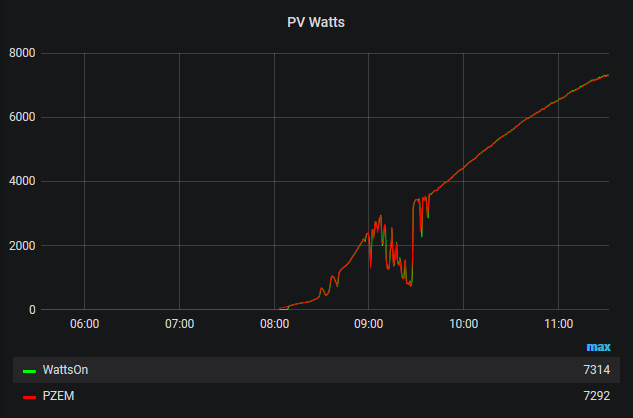
What’s surprising is it’s actually fairly accurate. Not bad for a 10 buck device!
Here’s a shot comparing the two:
At 10 bucks a pop, one could use three of them to make the measurements, do the math
in a Python script, then send the data to Influx. Total outlay would be less than 50 bucks.
Sorry to get so long winded on ya. But I don’t really have any suggestions to offer. ![]()