Hi,
I want to replace the controller board of an old 3000 watt dc-motor-controlled voltage stabilizer. I am planning to sense the voltage from the built-in secondary winding of the voltage stabilizer, and based on the sensed voltage, stabilize the voltage by controlling the motor using L289N motor controller. Also I am planning to use esp8266 as the micro-controller.
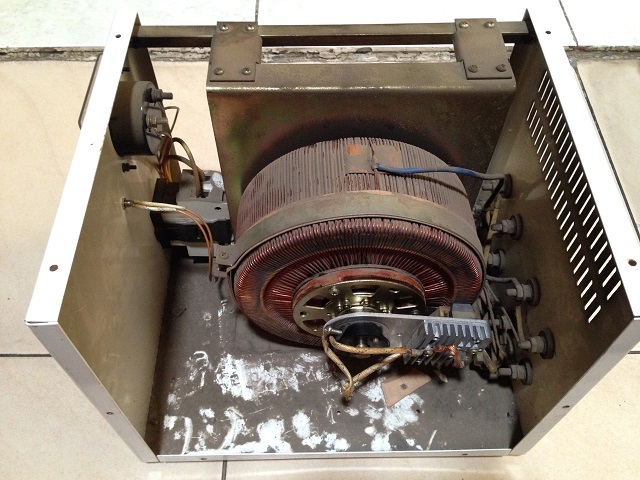
For anyone interested, here is the photo of the voltage stabilizer I was talking about:
It was suggested in several places in this forum that, to be able to power the microcontroller (esp8266 in my case) while simultaneously monitor the AC voltage using only one transformer is by using half-wave bridge rectifier - which is currently implemented on emon Tx v3.
I then study the emonTx v3.4.2 circuit - found on Github - particularly the AC Voltage sensor circuitry.
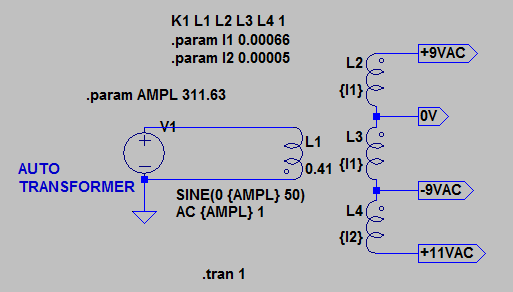
To get better understanding of how the circuit works, I then simulated the circuit on LTspice, before I put it on simulation board / breadboard.
But the result I got was very strange, please refer to the circuit below:
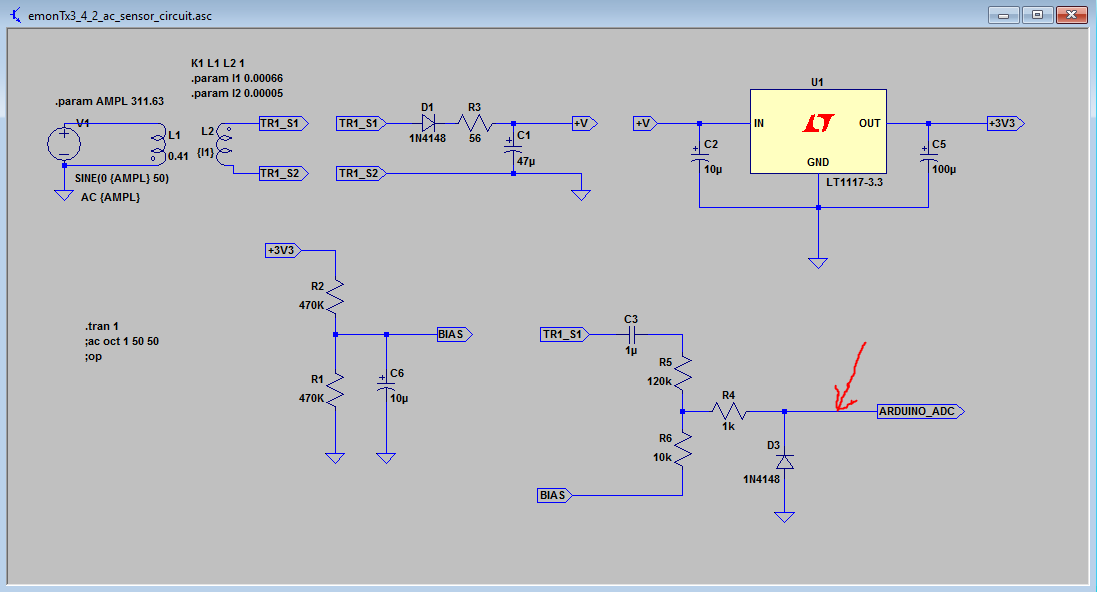
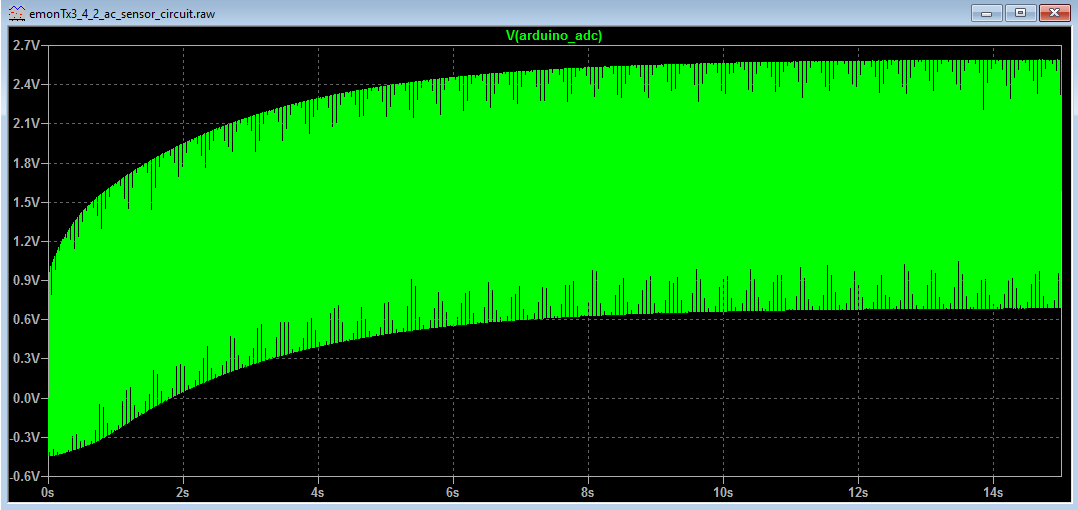
With 1 second simulation, this is what I got if I place the probe at ARDUINO_ADC net (indicated by red arrow in the picture above):
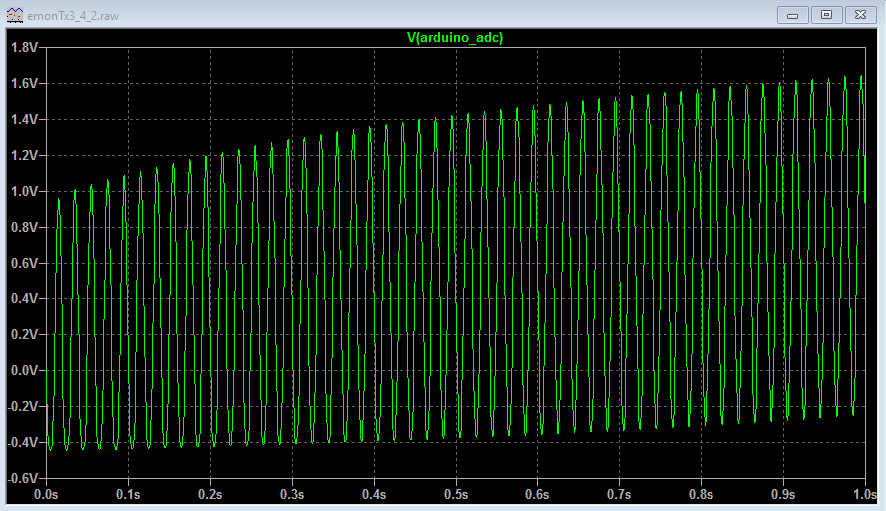
As shown in the screen shot above, negative voltage from 0 volt to -4 volt exist!
And also it seems the voltage is steadily increasing, but very slow.
Of course the circuit on Github is correct, so I must have doing something wrong in the LTspice simulation.
Can somebody please help me point out where or what I have done wrong…?
For anybody interested in testing the LTspice schematic I made, I have attached it here -
emonTx3_4_2_ac_sensor_circuit.zip (159.9 KB)
I admit I am very new to simulation software (LTspice etc.), but I’ve been learning it so hard for a few weeks now 
Also I don’t have good basics on electronics, but I have built several diy projects in the past (mostly diy guitar pedal fx projects and couple of arduino projects) with fair success.
Any help or advise are really appreciated.
Thanks!