Have just taken delivery of my EmonEVSE unit in order to charge my Leaf from excess solar PV output, replacing a dumb Rolec wallbox. Pleased so far with the unit, however I have noticed now we have some actual sunny days that the car does not seem to follow the pilot signal properly. Most noticeably it either cuts off when the pilot drops below 8A or charges at full power regardless of the pilot value when charging comes on. PS: Max charging limit is set to 15A presently due to temporary small gauge cables/connectors supplying the unit. That does seem effective. Indeed if I adjust this value up and down the car responds accordingly. I have not tried poking at RAPI interface yet, just the web UI.
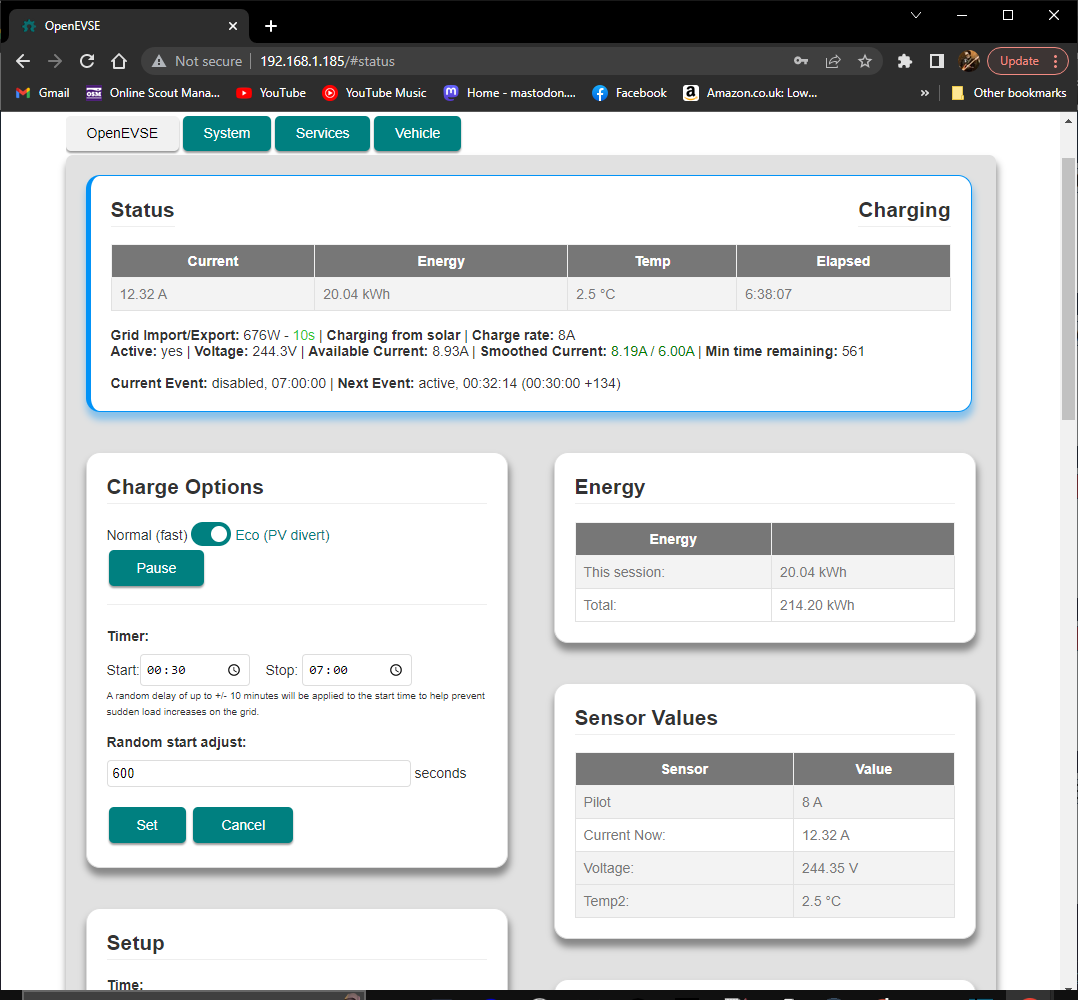
Here is a screenshot of what I can see when it solar kicks in:
I also noticed that the car limits charging to ~2-3A less than the pilot. This seemed like some sort of calibration error in the duty cycle and may explain the cutoff at 8A behaviour.
Any idea what’s going on here? What can I test to try and debug this?
OK so I poked around with the HTTP & MQTT APIs and using a manual override I can make the following observation: the car seems only to respond to the “charge_current” command to update the pilot a few seconds AFTER it starts charging and only if the value is CHANGED. It remains 2-3A lower than the pilot once it starts responding. Perhaps this is ‘normal’ behaviour for the Leaf? Mine is a MK 2 from 2018 with the 40kWh battery if that helps…
I have the same issue too, the current charge is 2-3A lower than the pilot but I’ve a hyundai kona. I guess doesn’t depend on the the car model. That issue is always present even if the Current Shaper or PV divert are disabled.
Interesting. So I have written my own control software for the PV divert function and am no longer using the onboard feature on OpenEVSE.
To avoid the issue with the pilot being out of calibration (?) I simply adjust it up or down incrementally on each grid reading input to keep the grid export close to zero. This ensures the car charger accurately soaks up all your excess grid power (provided it needs to charge at all.)
To avoid the problem of the car shutting off or not responding to the initial pilot, the software has a configurable lower limit (8A works for me) and I start it 2A above this regardless of the actual excess grid power available. It then increments towards the required value from there in a few grid reading inputs. This seems to fix the issues I observed earlier, at least for my car .
I wonder how many other cars show this poor calibration to the pilot signal?
I will post my software to GitHub when I have tidied it up a bit! It also does a simple Domoticz HA integration which may be handy for some.
Posted it yesterday so should be with you soon. Had three nights of full speed charging now and the solar divert working correctly. Thanks @glyn.hudson
Old thread but just to complete the story, my issue was also resolved with a new OpenEVSE board.
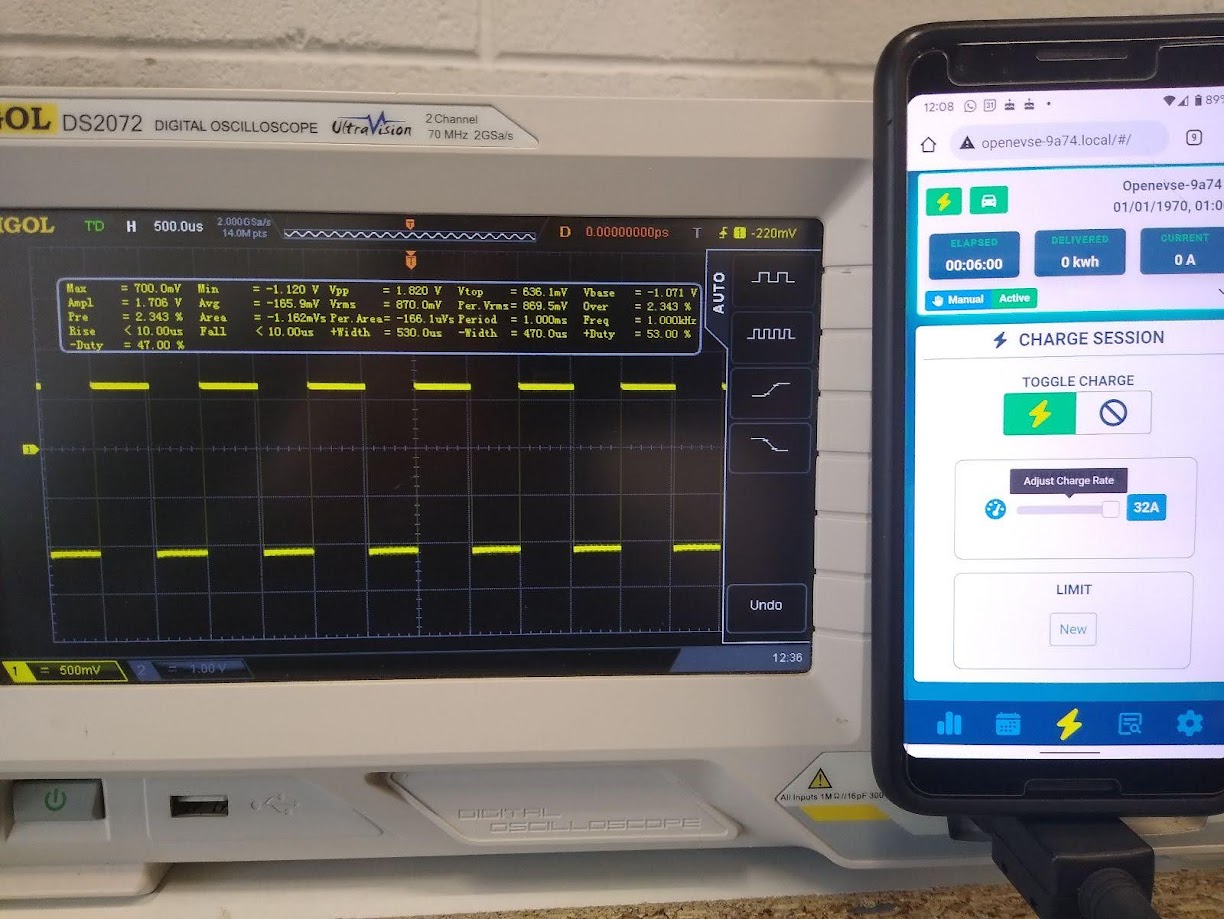
In my case the slew rate of the pilot signal was low, and two different EV cars both detected the pulse width as lower than it should be, leading the under current charging. Faulty op-amp driving the pilot line.