Sort of continuing on from the discussion about interval vs sendinterval in this thread
I happened to find a page in the guide about emonhub interfacers
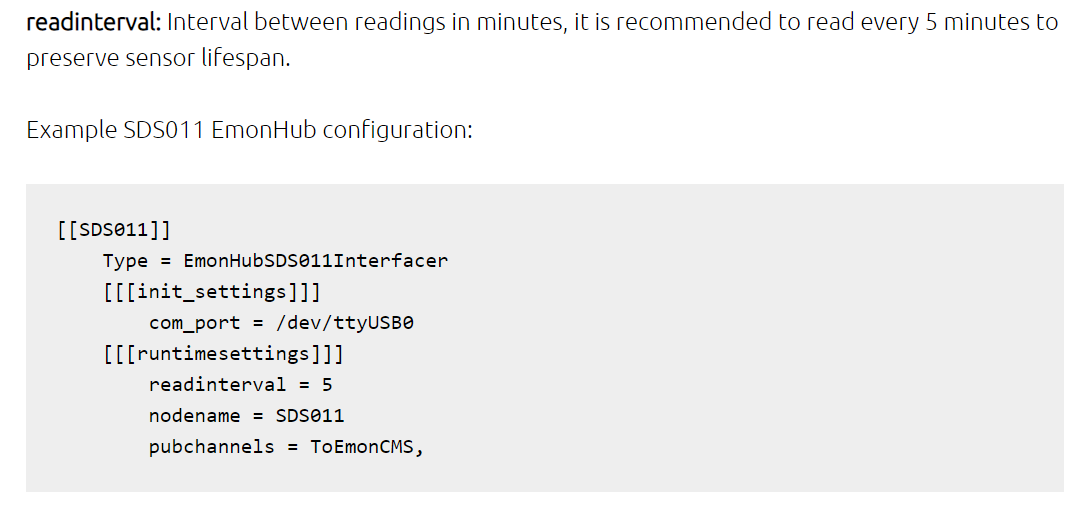
and it seems that the SDS011 Air-Quality sensor interfacer uses readinterval
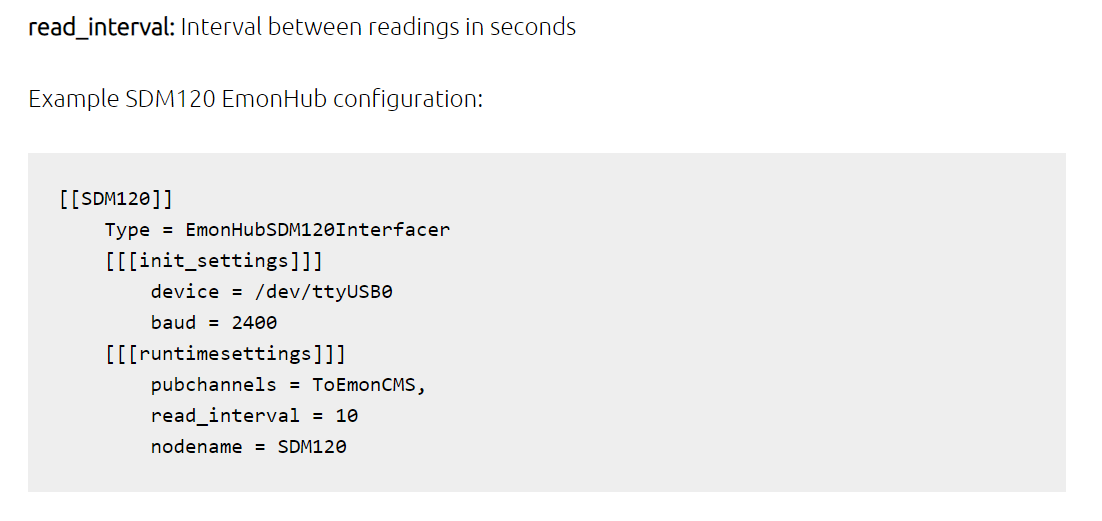
the SDM120 single-phase meter interfacer uses read_interval with an underscore.
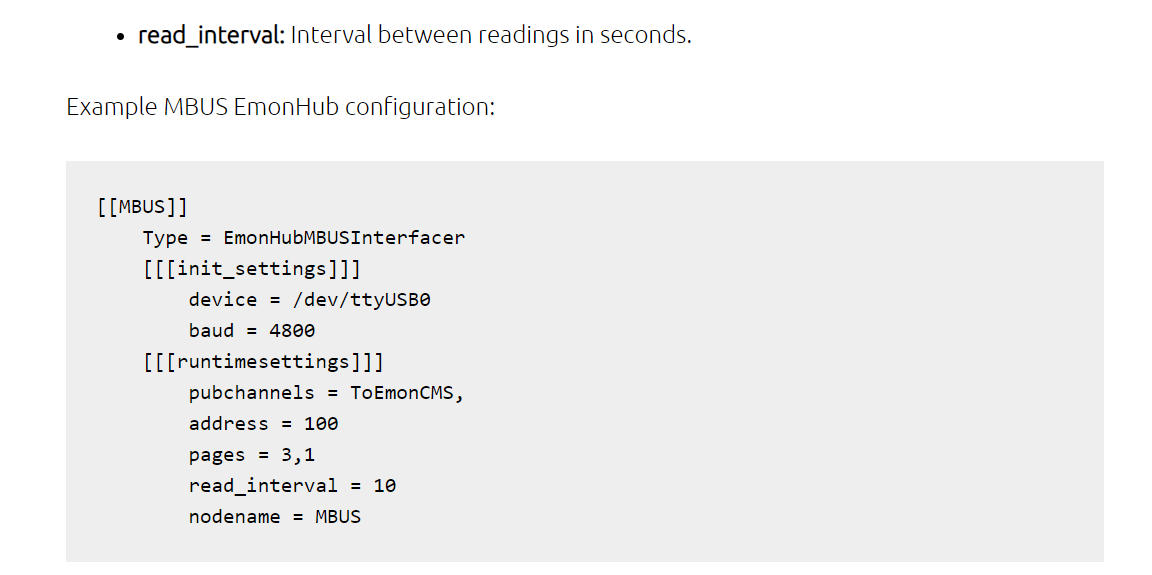
As does the MBUS interfacer
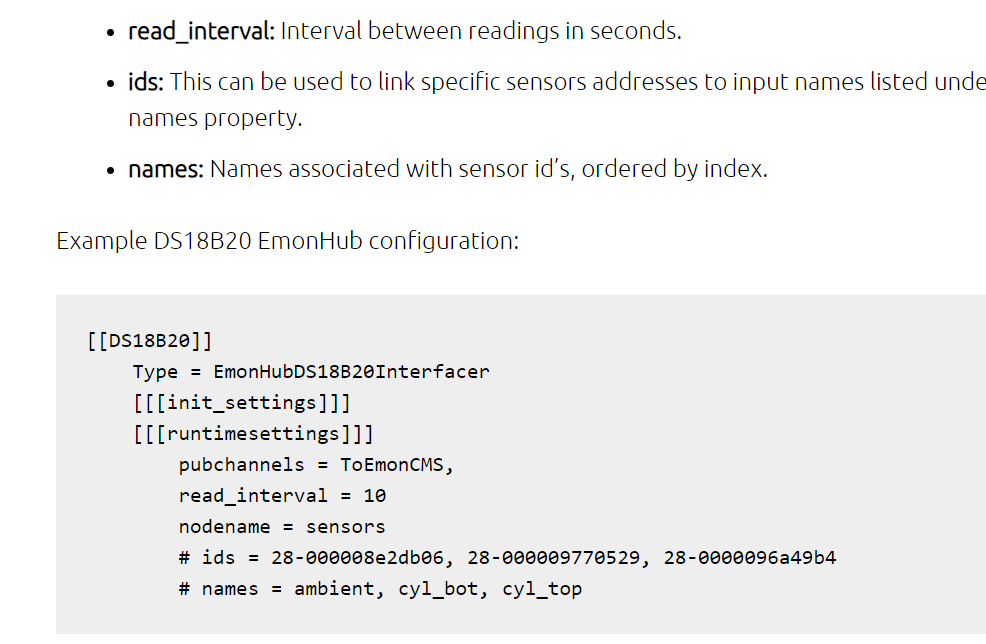
as does the ds18b20 interfacer
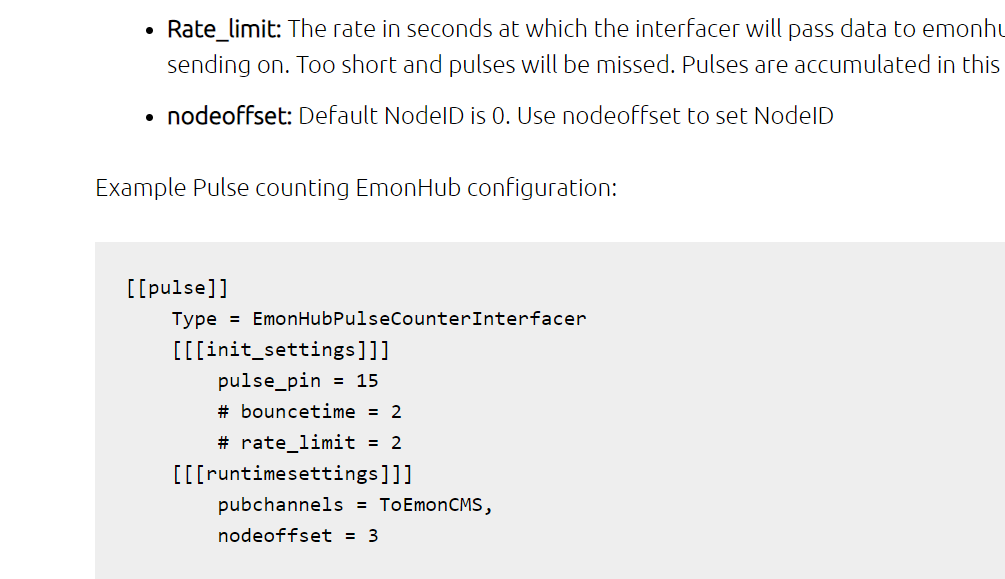
whereas the direct pulse interfacer uses rate_limit.
and the Tesla powerwall interfacer uses readinterval again.

At the bottom of the page there are some links to other interacers so I took a gander at those too
the Modbus Renogy interfacer uses poll_interval

SMA solar interfacer uses timeinterval

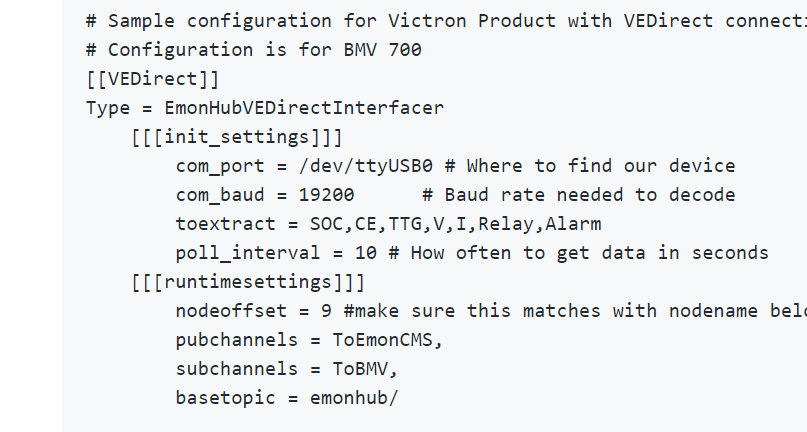
the Victron VE.direct interfacer uses poll_interval
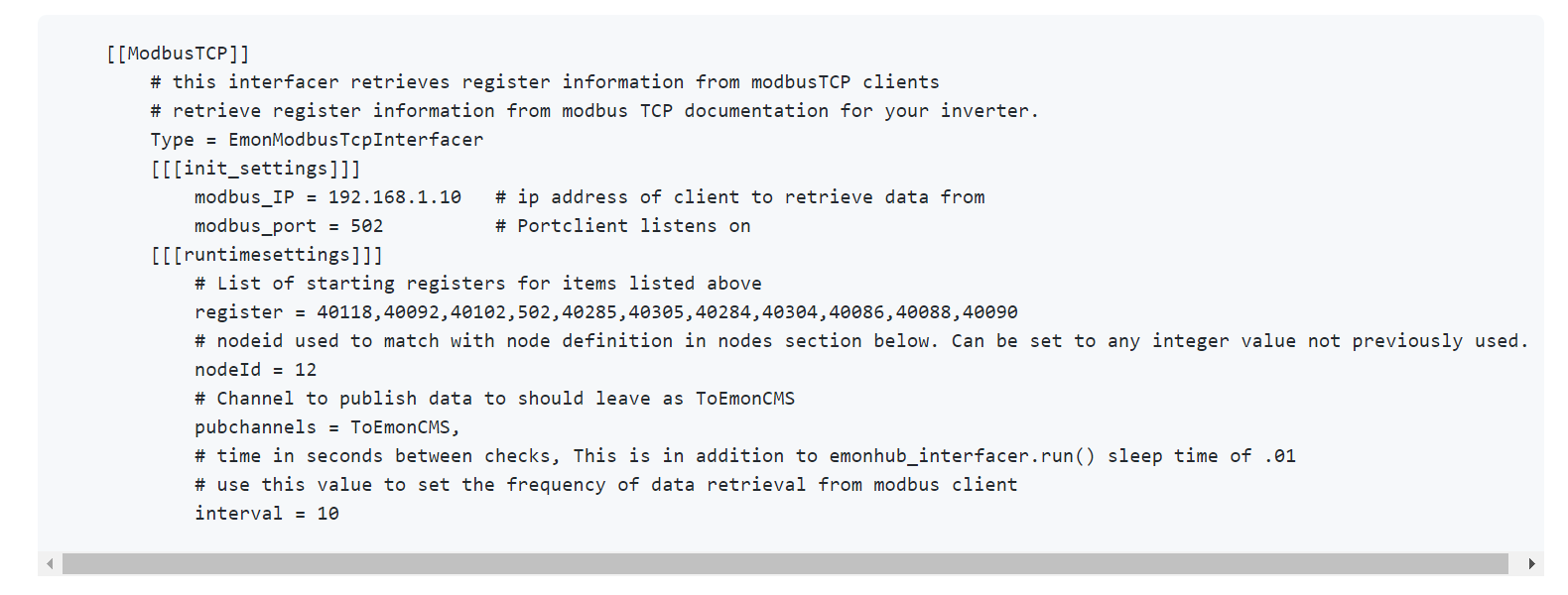
and lastly the Modbus TCP interfacer uses interval
That’s alot of different settings for essentially the same thing, the interval between iterations, reads, sends, polls etc. Not only is this confusing for the users, but with so many different settings there will undoubtedly be some errors slip into various posts and/or even docs, then it could become a right mess, the case of interval vs sendinterval is an example. I suspect this is also a significant amount or redundant code and wasted coding time since every interfacer inherits an interval setting from the core code.
Whilst these interfacers are relatively low use, it might be a good better time to correct it before it is far too late to fix. If not then this post may at least serve as documenting the different settings for different interfacers. That does of course assume that all the docs I’ve linked are correct and there are no other options.
If this does get fixed it is worth also noting that there is/was an undocumented rule of thumb to assist with settings placement. All init_settings settings were hypenated and all runtimesettings were not, so settingxyz = abc was clearly a runtimesetting whilst setting_xyz would be the same kinda setting but located in init_settings so that a simple instuction like “try setting some_option = abc” would not require detailed explanation as it is obviously an init_setting.
the interval and quiet etc are of course unhyphenated and therefore runtimesettings so one could argue that the poll_interval in the VE direct interfacer and rate_limit in the pulse counter are correct, but I question why they are init_settings and if we do need another interval in the init_settings it should ideally be (IMO) a more neutral interval_secs or similar setting in the core that can be utilised in any/all interfacers needing an init_setting interval.