Sorry to resurrect an ancient thread, but in case it’s relevant to anyone else, I have this exact setup (Elster water meter with PR6 pulse counter). I had it setup with an emonPi counting pulses but was getting quite a few spurious pulses (think the PR6 is susceptible to noise). I tried various resistors but eventually fixed it with a cheap ESP32 board (Waveshare ESP32-S3-GEEK). Had one lying around but this would work with others. It has a tiny LCD screen where we can display the running pulse total and the total of discarded pulses. Plugs directly into the Pi’s USB. Just two connections:
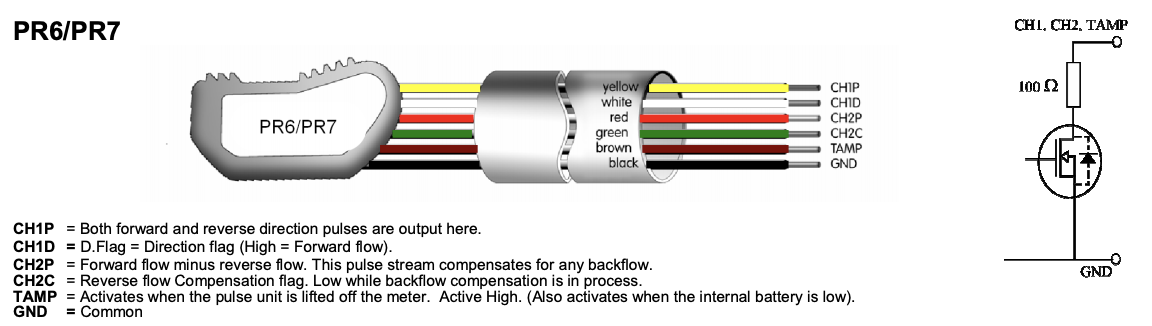
- black wire from PR6 → GND of ESP32
- red wire from PR6 → GPIO6 of ESP32
Downloaded micropython binary and flashed it to ESP32 using esptool. Here’s the micropython I used. It only counts a pulse of at least 40ms; it persists the total to memory every 10 valid pulses; it prints litres:XX over serial every 10s for easy inclusion in emonHub; and a 2s hold of the little boot button resets the counters. It displays the running totals on its screen
from machine import Pin, SPI
import framebuf, time, json, array
# ── Hardware ──────────────────────────────────────────────────────────────────
PULSE_PIN = 6
LCD_SCLK, LCD_MOSI, LCD_CS, LCD_DC, LCD_RST = 12, 11, 10, 8, 9
# ── Config ────────────────────────────────────────────────────────────────────
DEBOUNCE_US = 40_000 # ignore pulses shorter than 40 ms
SAVE_EVERY = 10 # persist to flash every N valid pulses
SERIAL_EVERY_S = 10 # serial output interval
STATE_FILE = '/state.json'
# ── Colors — RGB565 byte-swapped for MicroPython framebuf ────────────────────
def _rgb(r, g, b):
v = ((r & 0xF8) << 8) | ((g & 0xFC) << 3) | (b >> 3)
return ((v & 0xFF) << 8) | (v >> 8)
BLACK = 0x0000; WHITE = 0xFFFF
DARK = _rgb(0, 0, 48); GRAY = _rgb(120,120,120)
GREEN = _rgb(80, 220, 80); RED = _rgb(220, 60, 60)
# ── ISR state — pre-allocated, no heap allocation in handler ─────────────────
_fall_us = array.array('l', [0])
_ev_valid = array.array('i', [0])
_ev_discard = array.array('i', [0])
def _isr(pin):
if pin.value() == 0: # falling edge — pulse starts
_fall_us[0] = time.ticks_us()
else: # rising edge — pulse ends
t0 = _fall_us[0]
if t0:
dur = time.ticks_diff(time.ticks_us(), t0)
if dur >= DEBOUNCE_US:
_ev_valid[0] += 1
else:
_ev_discard[0] += 1
_fall_us[0] = 0
# ── Persistence ───────────────────────────────────────────────────────────────
def load_state():
try:
with open(STATE_FILE) as f:
d = json.load(f)
return int(d.get('count', 0)), int(d.get('discarded', 0))
except:
return 0, 0
def save_state(count, discarded):
with open(STATE_FILE, 'w') as f:
json.dump({'count': count, 'discarded': discarded}, f)
# ── ST7789 240×135 LCD driver (Waveshare ESP32-S3-GEEK) ──────────────────────
class Display:
W, H = 240, 135
X0, Y0 = 40, 52 # hardware offsets for this specific panel
def __init__(self):
spi = SPI(1, baudrate=40_000_000,
sck=Pin(LCD_SCLK), mosi=Pin(LCD_MOSI),
polarity=1, phase=1)
self._spi = spi
self._cs = Pin(LCD_CS, Pin.OUT, value=1)
self._dc = Pin(LCD_DC, Pin.OUT, value=0)
self._rst = Pin(LCD_RST, Pin.OUT, value=1)
self._cs.value(0); time.sleep_ms(20)
self._rst.value(0); time.sleep_ms(20)
self._rst.value(1); time.sleep_ms(50)
def r(c, *a):
self._cmd(c, bytes(a) if a else None)
r(0x36, 0x70); r(0x3A, 0x05)
r(0xB2, 0x0C,0x0C,0x00,0x33,0x33); r(0xB7, 0x35)
r(0xBB, 0x19); r(0xC0, 0x2C); r(0xC2, 0x01)
r(0xC3, 0x12); r(0xC4, 0x20); r(0xC6, 0x0F)
r(0xD0, 0xA4,0xA1)
r(0xE0, 0xD0,0x04,0x0D,0x11,0x13,0x2B,0x3F,0x54,0x4C,0x18,0x0D,0x0B,0x1F,0x23)
r(0xE1, 0xD0,0x04,0x0C,0x11,0x13,0x2C,0x3F,0x44,0x51,0x2F,0x1F,0x1F,0x20,0x23)
self._cmd(0x21); self._cmd(0x11); time.sleep_ms(120)
self._cmd(0x29); time.sleep_ms(20)
self._buf = bytearray(self.W * self.H * 2)
self._fb = framebuf.FrameBuffer(self._buf, self.W, self.H, framebuf.RGB565)
def _cmd(self, cmd, dat=None):
self._dc.value(0); self._cs.value(0)
self._spi.write(bytes([cmd])); self._cs.value(1)
if dat is not None:
self._dc.value(1); self._cs.value(0)
self._spi.write(dat if isinstance(dat, (bytes, bytearray)) else bytes([dat]))
self._cs.value(1)
def show(self):
x0, x1 = self.X0, self.X0 + self.W - 1
y0, y1 = self.Y0, self.Y0 + self.H - 1
self._cmd(0x2A, bytes([x0>>8, x0&0xFF, x1>>8, x1&0xFF]))
self._cmd(0x2B, bytes([y0>>8, y0&0xFF, y1>>8, y1&0xFF]))
self._dc.value(0); self._cs.value(0)
self._spi.write(b'\x2C'); self._dc.value(1)
mv = memoryview(self._buf)
for i in range(0, len(self._buf), 4096):
self._spi.write(mv[i:i+4096])
self._cs.value(1)
def text_s(self, s, x, y, fg, bg, scale=2):
bw = len(s) * 8; stride = (bw + 7) // 8
mono = bytearray(stride * 8)
mfb = framebuf.FrameBuffer(mono, bw, 8, framebuf.MONO_HLSB)
mfb.fill(0); mfb.text(s, 0, 0, 1)
for cy in range(8):
row = cy * stride
for cx in range(bw):
bit = (mono[row + cx // 8] >> (7 - cx % 8)) & 1
c = fg if bit else bg
px, py = x + cx * scale, y + cy * scale
for sy in range(scale):
for sx in range(scale):
nx, ny = px + sx, py + sy
if 0 <= nx < self.W and 0 <= ny < self.H:
self._fb.pixel(nx, ny, c)
def draw(self, count, discarded):
self._fb.fill(DARK)
self.text_s("Valid", 8, 8, GRAY, DARK, scale=2)
self.text_s(f"{count} L", 8, 30, GREEN, DARK, scale=3)
self.text_s("Discarded", 8, 88, GRAY, DARK, scale=2)
self.text_s(str(discarded), 8, 110, RED, DARK, scale=2)
self.show()
# ── Main ──────────────────────────────────────────────────────────────────────
RESET_HOLD_MS = 2000
def main():
count, discarded = load_state()
unsaved = 0
disp = Display()
disp.draw(count, discarded)
pin = Pin(PULSE_PIN, Pin.IN, Pin.PULL_UP)
pin.irq(trigger=Pin.IRQ_RISING | Pin.IRQ_FALLING, handler=_isr)
btn = Pin(0, Pin.IN, Pin.PULL_UP) # BOOT button, active-low
btn_down_ms = None
last_serial = time.time()
dirty = False
print(f"Water meter started — count={count} discarded={discarded}")
while True:
now_ms = time.ticks_ms()
if btn.value() == 0:
if btn_down_ms is None:
btn_down_ms = now_ms
elif time.ticks_diff(now_ms, btn_down_ms) >= RESET_HOLD_MS:
count = 0; discarded = 0; unsaved = 0
save_state(0, 0)
_ev_valid[0] = 0; _ev_discard[0] = 0
btn_down_ms = None
print("litres:0")
disp._fb.fill(DARK)
disp.text_s("RESET!", 40, 55, WHITE, DARK, scale=4)
disp.show(); time.sleep_ms(1000)
dirty = True
else:
btn_down_ms = None
nv = _ev_valid[0]; _ev_valid[0] = 0
nd = _ev_discard[0]; _ev_discard[0] = 0
if nv or nd:
count += nv; discarded += nd; unsaved += nv; dirty = True
if unsaved >= SAVE_EVERY:
save_state(count, discarded); unsaved = 0
if dirty:
disp.draw(count, discarded); dirty = False
now = time.time()
if now - last_serial >= SERIAL_EVERY_S:
print(f"litres:{count}")
last_serial = now
time.sleep_ms(50)
main()
Quite a niche, but for ~£10 of hardware it’s worth it for anyone else looking at pulses counted getting ahead of the meter reading..